Publications
(For a full list see below or go to Google Scholar, ResearchGate)
Highlights
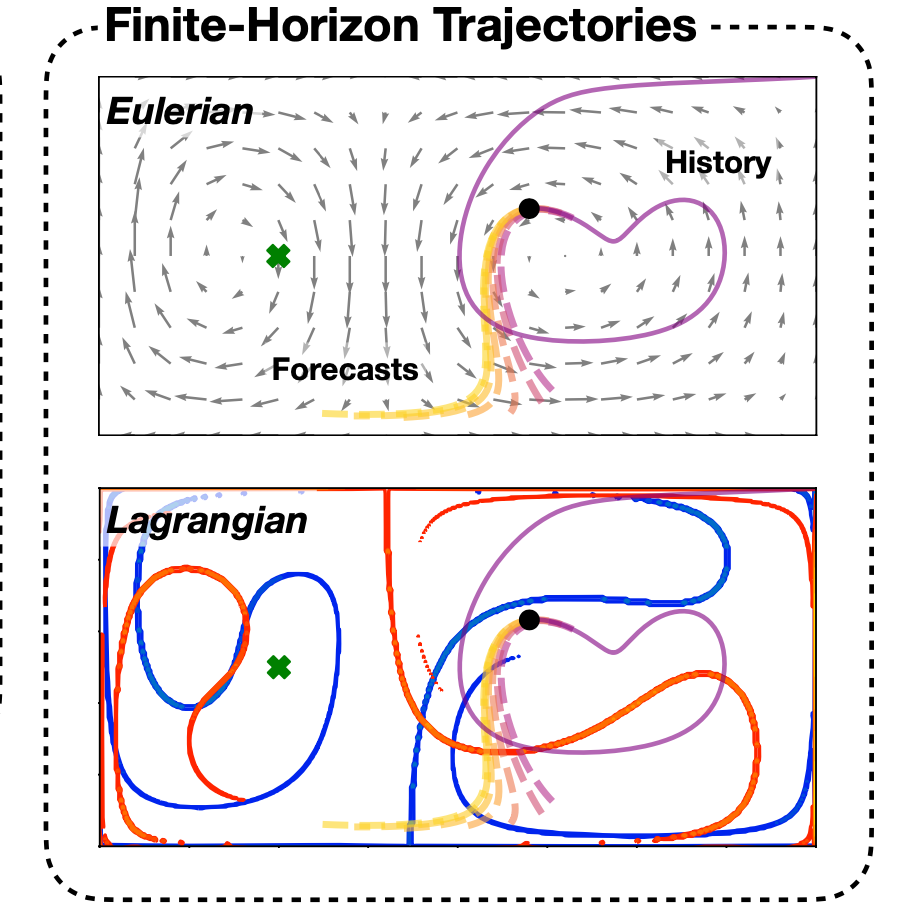
We investigate the use of finite-horizon model predictive control (MPC) for the energy-efficient trajectory planning of an active mobile sensor in an unsteady fluid flow field. We uncover connections between trajectories optimized over a finite-time horizon and finite-time Lyapunov exponents of the background flow, confirming that energy-efficient trajectories exploit invariant coherent structures in the flow.
K Krishna, Z Song, S Brunton
Proceedings of Royal Society A (2022)

This letter demonstrates the feasibility of near realtime, plenoptic-inertial navigation on a low-cost central processing unit (CPU). The relationship between distance and disparity for the simplified model was experimentally validated in an aquatic environment, using a first-generation Lytro camera, and a mean error of 2% of the target distance was obtained.
J Eisele, Z Song, K Nelson, K Mohseni
IEEE Robotics and Automation Letters (2019)

We present the concept of concurrent flow-based localization and mapping (FLAM) for autonomous field robots navigating within background flows. FLAM utilizes the continuous flow fields as navigation references for mobile robots and provides flow field mapping capability with in-situ flow velocity observations.
Z Song, K Mohseni

We proposed a system that semantically discriminates the visual inputs of the robot’s environment by combining task-directed and stimulation-based focus to encode artificial “attention”, to enhance exploration decision making. The hybrid focus model allows a metric map to be generated with semantic labels of the desired types of objects.
C Meek, Z Song
A current-aided inertial navigation framework is proposed for small autonomous underwater vehicles in long-duration operations (>1 h), where neither frequent surfacing nor consistent bottom tracking is available. This strategy mitigates dead-reckoning uncertainty of inertial navigation systems by comparing the estimate of local ambient flow velocity with preloaded ocean current maps.
Z Song, K Mohseni
IEEE Journal of Oceanic Engineering (2017)

A multi-vehicle flocking and guidance control scheme is proposed for small autonomous underwater vehicles in the presence of strong ocean flows that exceed vehicles’ actuation capabilities. The flocking problem and flock guidance problem are simultaneously addressed by enduing fluid properties to the vehicle swarm.
Z Song, D Lipinski, K Mohseni
Ocean Engineering (2017) | PDF

We investigate the mobility of a robot swarm in dominant and dynamically changing ocean currents. A physicomimetic swarm control law is proposed such that pair-wise self-propulsion is applied analogously to internal forces among atoms or molecules.
Z Song, K Mohseni
Full List since 2013
Swarm Modelling with Dynamic Mode Decomposition [Under review]
E Hansen, S, Brunton, Z Song | arXiv
Resilient time-varying formation tracking for mobile robot networks under positioning attacks [Under review]
Y Liu, K Liu, Z Song | arXiv
Finite-horizon, energy-optimal trajectories in unsteady flows
K Krishna, Z Song, S Brunton | Proceedings of Royal Society A (2022)
UAV path planning for optimal coverage of areas with nonuniform importance
G Snyder, S Shriwastav, D Morrison-Fogel, Z Song | AIAA SciTech (2022) | arXiv
FTLE of optimally controlled agents in unsteady flow fields
K Krishna, S, Brunton, Z Song [APS DFD 2021 abstract] | APS DFD 2021 (2021)
SwarmDMD: A data-driven method for swarm modeling and analysis
E Hansen, S, Brunton, Z Song [APS DFD 2021 abstract] | APS DFD (2021)
Co-design optimization for underwater vehicle docking systems
J Wallen, M Jeske, Z Song | IEEE OCEANS-San Diego/Porto (2021) [Student Poster Competition Finalist] | arXiv
Heterogeneous fixed-wing aerial vehicles for resilient coverage of an area
S Shriwastav, Z Song | AIAA SciTech (2021)
Navigating unsteady flows - From finite-time Lyapunov exponents to finite-horizon energy-optimal trajectories
K Krishna, Z Song, S Brunton | APS DFD (2020)
Resident subsea robotic systems - A review
Z Song, A Marburg, D Manalang | Marine Technology Society Journal (2020) [Invited]
Coordinated coverage and fault tolerance using fixed-wing unmanned aerial vehicles
S Shriwastav, Z Song | ICUAS (2020)
Visual-inertial guidance with a plenoptic camera for autonomous underwater vehicles
J Eisele, Z Song, K Nelson, K Mohseni | IEEE Robotics and Automation Letters (2019)
Concurrent flow-based localization and mapping in time-invariant flow fields
Z Song, K Mohseni | IEEE IROS (2019)
Fast autonomous underwater exploration using a hybrid focus model with semantic representation
C Meek, Z Song | IEEE OCEANS-Seattle (2019)
Underwater docking system for a wave energy converter based mobile station
J Wallen, N Ulm, Z Song | IEEE OCEANS-Seattle (2019)
Development of an adaptive docking station for resident underwater vehicles
J Wallen, Z Song | IEEE OCEANS-Marseille (2019)
Toward the temperature distribution on ball bearing inner rings during single-grit grinding
G Yu, Q Wang, Z Song, D Fang, Y Li, Y Yao | International Journal of Advanced Manufacturing Technology (2019)
Simultaneous AUV localization and lagrangian particle tracking
Z Song, K Mohseni | IEEE OCEANS-Charleston (2018) | PDF
Development of a compact autonomous underwater vehicle for hierarchical multi-agent cooperation
Z Song, M Krieg, K Mohseni | IEEE OCEANS-Charleston (2018) | PDF
Wear-life analysis of deep groove ball bearings based on Archard wear theory
G Yu, W Xia, Z Song, R Wu, S Wang, Y Yao | Journal of Mechanical Science and Technology (2018)
Anisotropic flocking control of distributed multi-agent systems using fluid abstraction
MB Silic, Z Song, K Mohseni | AIAA-SciTech (2018)
Automated AUV docking control with light-field imaging
Z Song, K Mohseni | IEEE OCEANS-Anchorage (2017) | PDF
Cooperative mid-depth navigation aided by ocean current prediction
Z Song, K Mohseni | IEEE OCEANS-Anchorage (2017)
Bioinspired visual guidance in turbid underwater environment
Z Song, E Schwartz, K Mohseni | IEEE Sensors Conference (2017)
A low-power optical communication modem for compact autonomous underwater vehicles
Z Song, E Schwartz, K Mohseni | IEEE Sensors Conference (2017) | PDF
Long-term inertial navigation aided by dynamics of flow field features
Z Song, K Mohseni | IEEE Journal of Oceanic Engineering (2017)
FACON: A flow-aided cooperative navigation scheme
Z Song, K Mohseni | IEEE IROS (2017) | PDF
Multi-vehicle cooperation and nearly fuel-optimal flock guidance in strong background flows
Z Song, D Lipinski, K Mohseni | Ocean Engineering (2017) | PDF
A compact autonomous underwater vehicle with cephalopod-inspired propulsion
Z Song, C Mazzola, E Schwartz, R Chen, J Finlaw, M Krieg, K Mohseni | Marine Technology Society Journal (2016)
Anisotropic active Lagrangian particle swarm control in a meandering jet
Z Song, K Mohseni | IEEE CDC (2015)
Towards background flow based AUV localization
Z Song, K Mohseni | IEEE CDC (2014)
Autonomous vehicle localization in a vector field: Underwater vehicle implementation
Z Song, K Mohseni | IEEE IROS (2014)
A distributed localization hierarchy for an AUV swarm
Z Song, K Mohseni | IEEE ACC (2014)
Fluid-based cooperative underwater localization
Z Song, K Mohseni | IEEE CDC (2013)
Hierarchical underwater localization in dominating background flow fields
Z Song, K Mohseni | IEEE IROS (2013)
Cooperative underwater localization in ocean currents
Z Song, K Mohseni | AIAA GNC (2013)