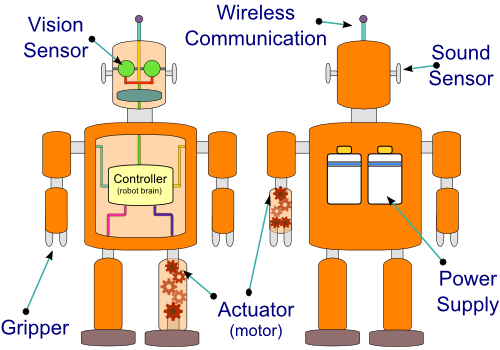
Hardware Configuration
- Manipulators including End Effectors
- Actuators including Locomotion
- Sensors
- Controllers
- Communication Interfaces
- Power Sources
from
Razor Robotics
| ⏪ | ◄ | 1 | | 2 | | 3 | | 4 | | 5 | | 6 | | 7 | | 8 | | 9 | | 10 | | 11 | | 12 | | 13 | | 14 | | 15 | | 16 | | 17 | | 18 | | 19 | | 20 | | 21 | | 22 | | 23 | | 24 | | 25 | | 26 | | 27 | | 28 | | 29 | | 30 | | 31 | | 32 | | 33 | | 34 | | 35 | ► | ⏩ |
Hardware Configuration
|
from
Razor Robotics
|
| Previous Slide | 10 of 35 | Next Slide |